Планирование движения для ровера на ходовой Ackerman'а
Sencis 2 минуты назад Планирование движения для ровера на ходовой Ackerman'а Средний 10 мин 35 DIY или Сделай сам Робототехника Алгоритмы * Обзор Из песочницы Несмотря на прогресс в технологиях и развитие...
<5 — 2026'da uzaya kaç SpaceX Starship fırlatması ulaşacak?
Значимый прорыв формирует отрасль ИИ: Sencis 2 минуты назад Планирование движения для ровера на ходовой Ackerman'а Средний 10 мин 35 DIY или Сделай сам Робототехника Алгоритмы * Обзор Из песочницы Несмотря на прогресс в технологиях и развитие микроэлектроники, задача поиска оптимального пути по-прежнему является весьма тяжёлой для современных вычислителей — будь то CPU или GPU. Горизонт планирования у многих локальных алгоритмов (например, DWA, TEB, MPPI на CPU) как правило не превышает нескольких метров, а иногда и дециметров. Однако планирование на большой временной интервал и дистанцию позволяет алгоритмам лучше находить пути в насыщенных препятствиями средах и является важным элементом системы уклонения от движущихся, динамических препятствий.
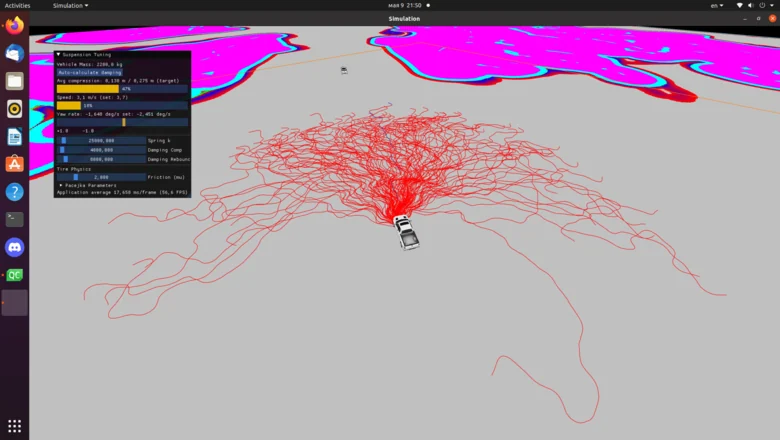
Для решения задачи создания модуля поиска пути с дальним горизонтом планирования в этой статье будет рассмотрен пакет локального планировщика MPPI-Generic, работающий на GPU. Он может работать в связке с планировщиком State Lattice Planner из ROS NAV2, но в этой демонстрации будет использоваться отдельно от него — как «универсальный планер». Тесты работы обоих пакетов планирования будут проводиться в самодельном Qt-OpenGL симуляторе автомобиля (пикапа), выполненном на C++ для более плотной интеграции с симулятором и удобного обращения к CUDA-ядрам MPPI-Generic.
Технические детали
Стоит начать с того, что в идеальной системе планирования разделение на глобальный и локальный планер должно отсутствовать. Планер должен быть универсальным: сразу рассчитывать при планировании все состояния системы и находить оптимальный путь. Такие системы встречаются на беспилотных машинах, ездящих по дорогам, — как правило, это либо массово-параллельный планер, либо нейросетевой.
Связка «глобальный + локальный планер» — вынужденная мера из-за ограничения вычислительной мощности современных компьютеров и сложности создания массово-параллельного глобального планера. У слова «глобальный» тоже есть оговорки. Настоящий глобальный планер предполагает планирование из вашего текущего местоположения до пункта назначения.
В терминах робототехники и ROS глобальный планер — это планер, способный проложить путь от одной точки до другой на складе, в офисе или у вас дома, то есть с горизонтом планирования в десятки метров. Иначе время планирования начинает выходить за рамки realtime и достигать десятков секунд или даже минут. Однако в outdoor-робототехнике планирования на несколько метров часто бывает недостаточно из-за большой скорости движения транспорта на улице.
Чтобы вовремя распознать опасное столкновение, нужно предсказывать траекторию всех видимых ровером машин хотя бы линейно (по текущему вектору скорости), а также знать свою траекторию на несколько десятков секунд вперёд. При этом успевать её пересчитывать на частоте поступления данных с главного источника информации о препятствиях — лидара, а это, как правило, 10–20 Гц, чтобы успеть отреагировать. К сожалению, многие алгоритмы в открытом доступе не вписываются в такие жёсткие рамки.
Этот прогресс даёт важные сигналы о будущем отрасли, и технологический мир внимательно наблюдает.




